Ground-air Operational Autonomous Systems
Objectives
Design and develop an unmanned vehicle that can cover from the ground to air operations with minimum control surfaces.
Applications
Narrow tunnel inspection, indoor structure inspection, exploration of lunar lava caves, etc.
Issues & Challenges
- Minimize control surfaces.
- Reduce the complexity of the design.
- Expand the scope of maneuverability.
Approaches & Results
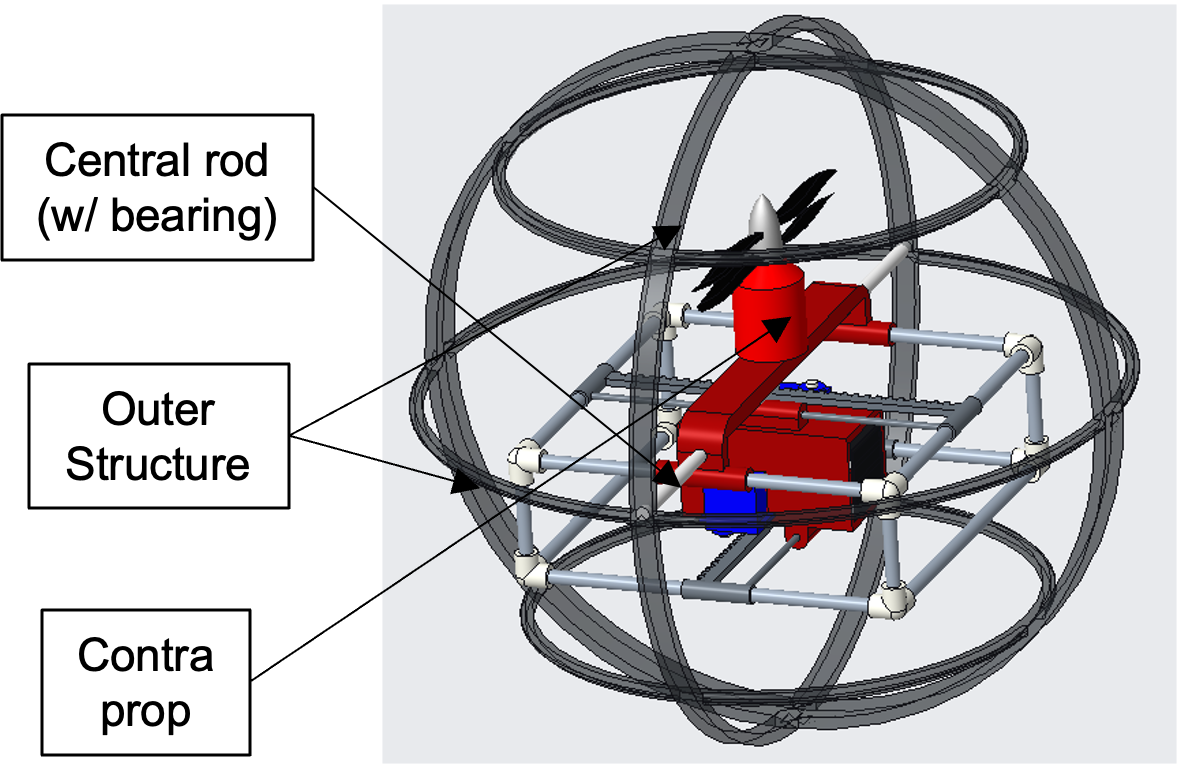
Approach 1: Center-of-gravity (COG) variation-driven system design and control
Researcher: Sungwook Yang
- It introduces a COG-variation-driven operation strategy for a sphere-shaped platform via single thruster vector control. [IJAE 2020], [APISAT 2017]
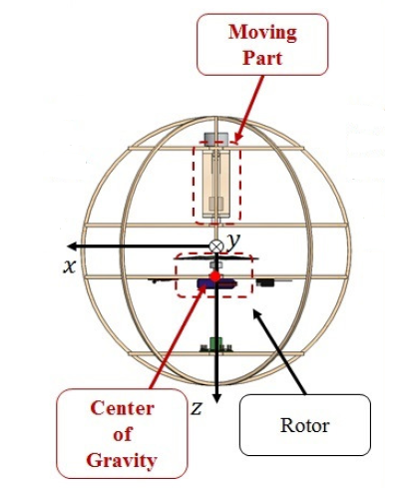

- It expands the maneuverability to both ground and air spaces.
Real-time collision-free Navigation
Objectives
Develop real-time collision avoidance techniques to operate multi-UAVs in densely populated 3D dynamic environments.
Applications
Delivery, search & rescue, urban traffic management, etc.
Issues & Challenges
- Circumvent local minima.
- Ensure feasible maneuvers.
- Resolve goal non-reachable phenomena due to obstacles nearby.
- Optimally determine tuning parameters governing the collision avoidance behavior.
- Guarantee real-time executable solution.
Approaches & Results
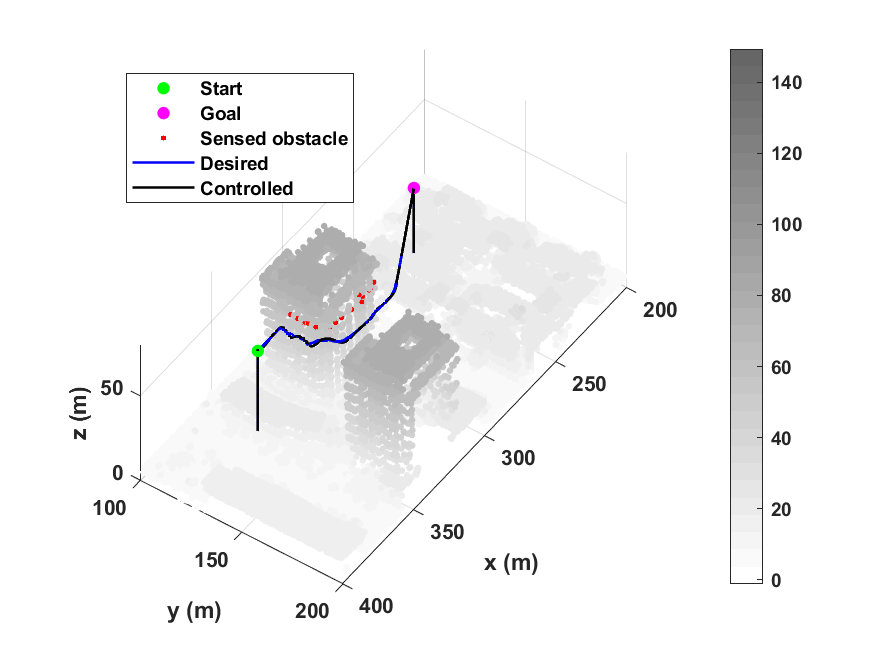
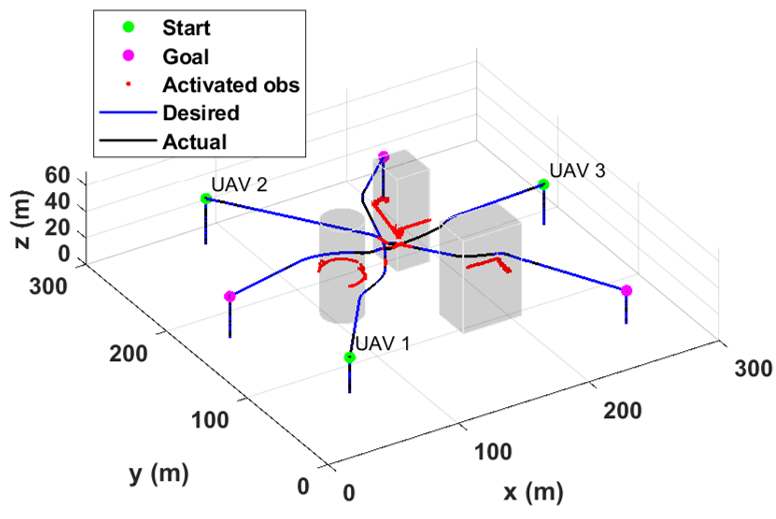
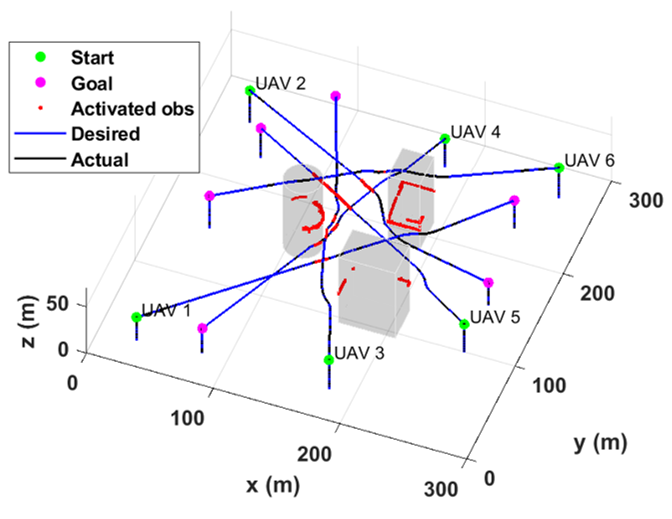
Approach 1: Enhanced potential field
Researchers: Daegyun Choi, Shyam Rauniyar
- It resolves local minima issues in 3D urban environments by introducing a new direction determination criterion. [Applied Sciences 2021]
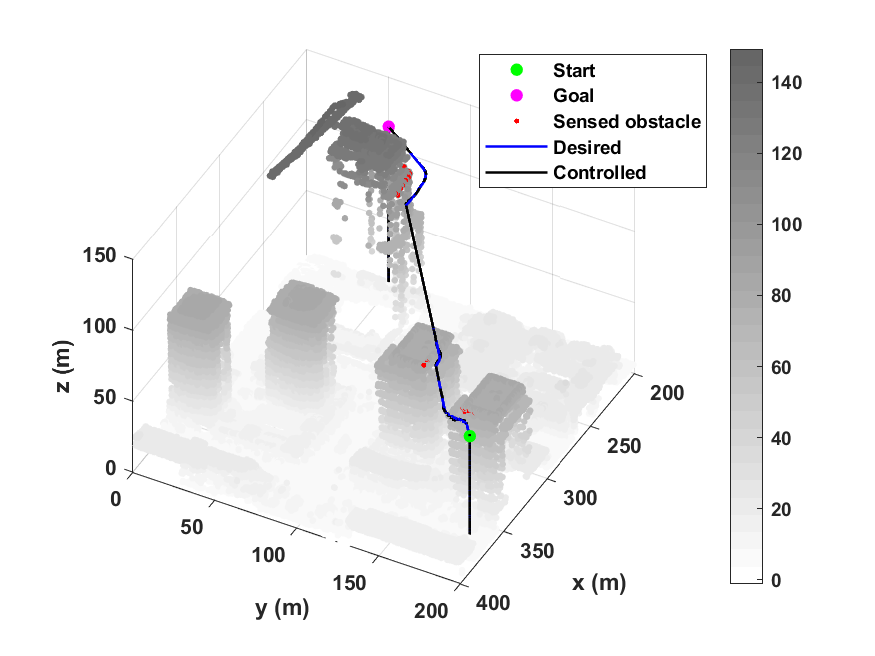
- It resolves local minima issues and infeasible maneuvers for avoiding dynamic obstacles by adopting new direction determination criteria. [SciTech 2020], [NAECON 2021]

Approach 2: Fuzzy Potential Field (FPF)
Researchers: Daegyun Choi, Anirudh Chhabra
- It combines genetic fuzzy inference systems and enhanced potential field to determine the magnitude and direction of the avoidance maneuver optimally. [NAECON 2021], [Robotica 2021], [SciTech 2022]
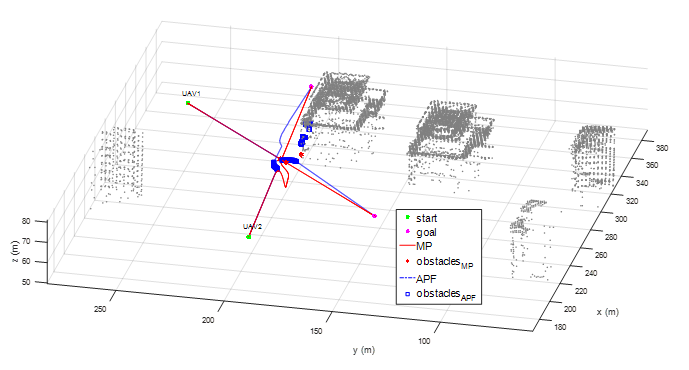
Approach 3: APF assisted Motion Primitives (APF-MPs)
Researcher: Daegyun Choi
- It determines the safe path candidates using APF and generates a locally optimal feasible path using MPs. [Applied Sciences 2021]

Fault Detection, Identification, and Reconfiguration
Objectives
Develop frameworks for failure diagnosis and fault-tolerant control for space mission resilience.
Applications
Actuator failure diagnosis, system reconfiguration, underactuated control, etc.
Issues & Challenges
- Diagnose malfunctioned actuators in real-time.
- Stabilize and control three-axis attitudes using two-axis controls.
Approaches & Results
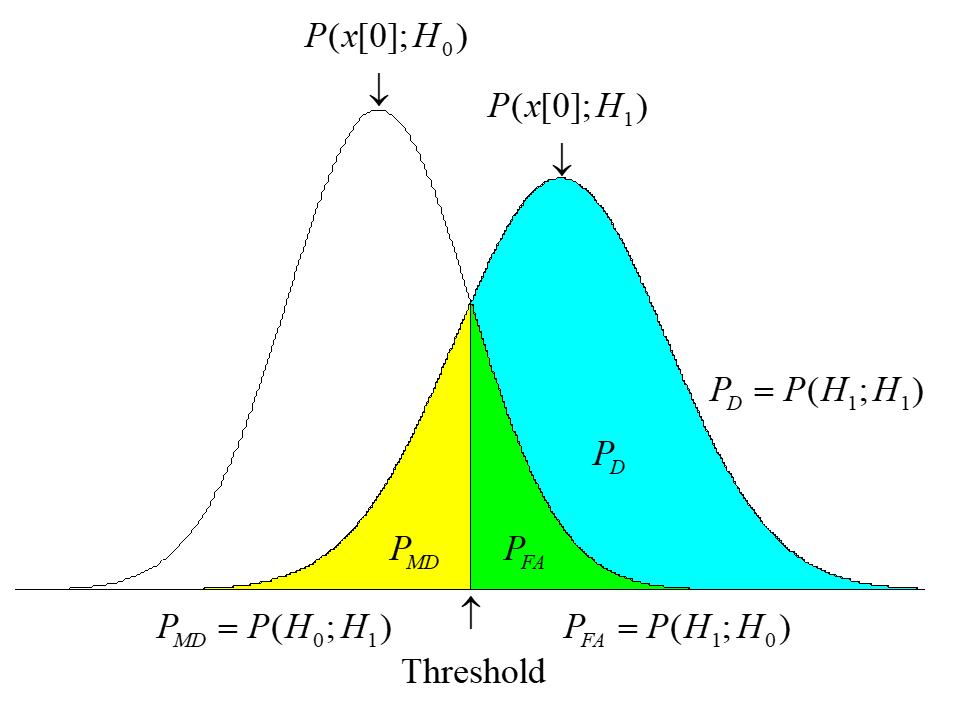
Approach 1: Neyman-Pearson Theorem
Researcher: Daegyun Choi
- It identifies faulty actuators and their degrees of failure using Neyman-Pearson (NP) theorem and extended Kalman filter (EKF). [IJCAS 2013]
Approach 2: Multi-sequential maneuvers using two-axis controls
Researcher: Donghoon Kim
- It controls underactuated spacecraft via multi-sequential single-axis maneuvers. [IJAE 2017]

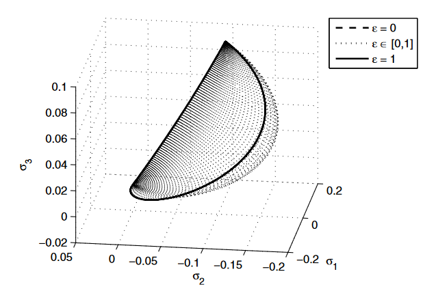
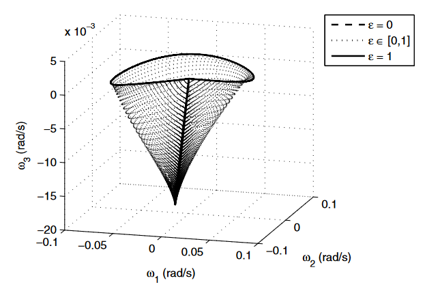
Approach 3: Simultaneous maneuver using two-axis controls
Researcher: Donghoon Kim
- It finds an optimal control solution for underactuated spacecraft by applying a homotopy approach. [AIAA 2015]
Ground Simulators for Space Robotics and Operations
Objectives
Develop a ground-based spacecraft simulator for hardware-in-the-loop simulations of on-orbit servicing missions.
Applications
Refueling, rendezvous, docking, capturing a tumbling object, etc.
Issues & Challenges
- Ensure high precision.
- Develop a low-cost solution.
- Demonstrate a wide range of motion.
- Avoid singularity issues.
Approaches & Results
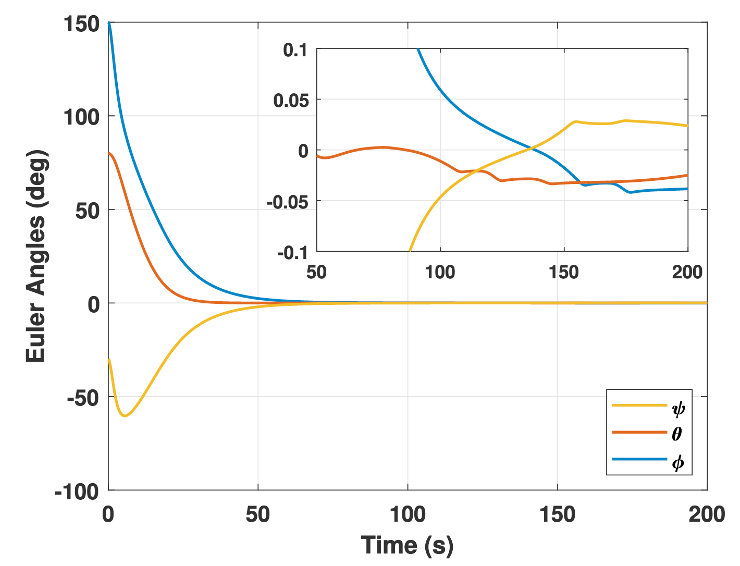
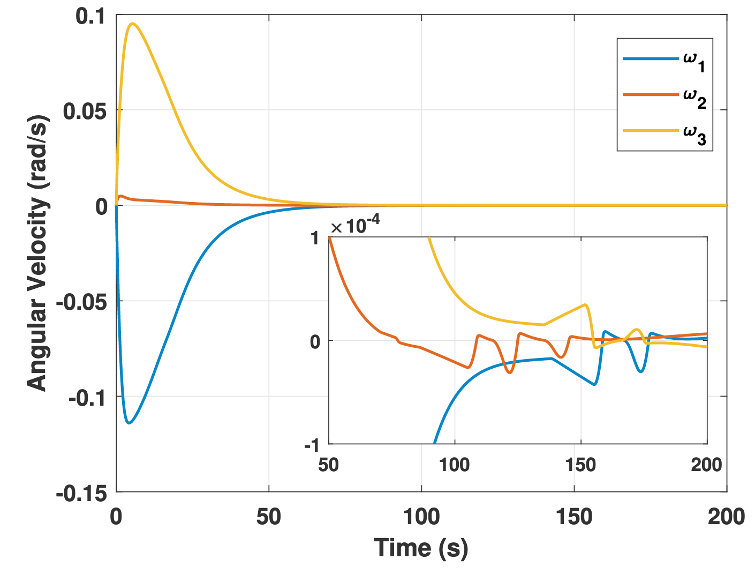
Approach 1: DYNAMOS: DYNamic Attitude-orbital MOtion Simulator
Researcher: Anirudh Chhabra
- Numerical Study: It tracks a scaled-down orbital trajectory using a closed-loop inverse kinematics controller offering robustness against singularities and joint limits. [JAIS 2021], [ASC 2021]
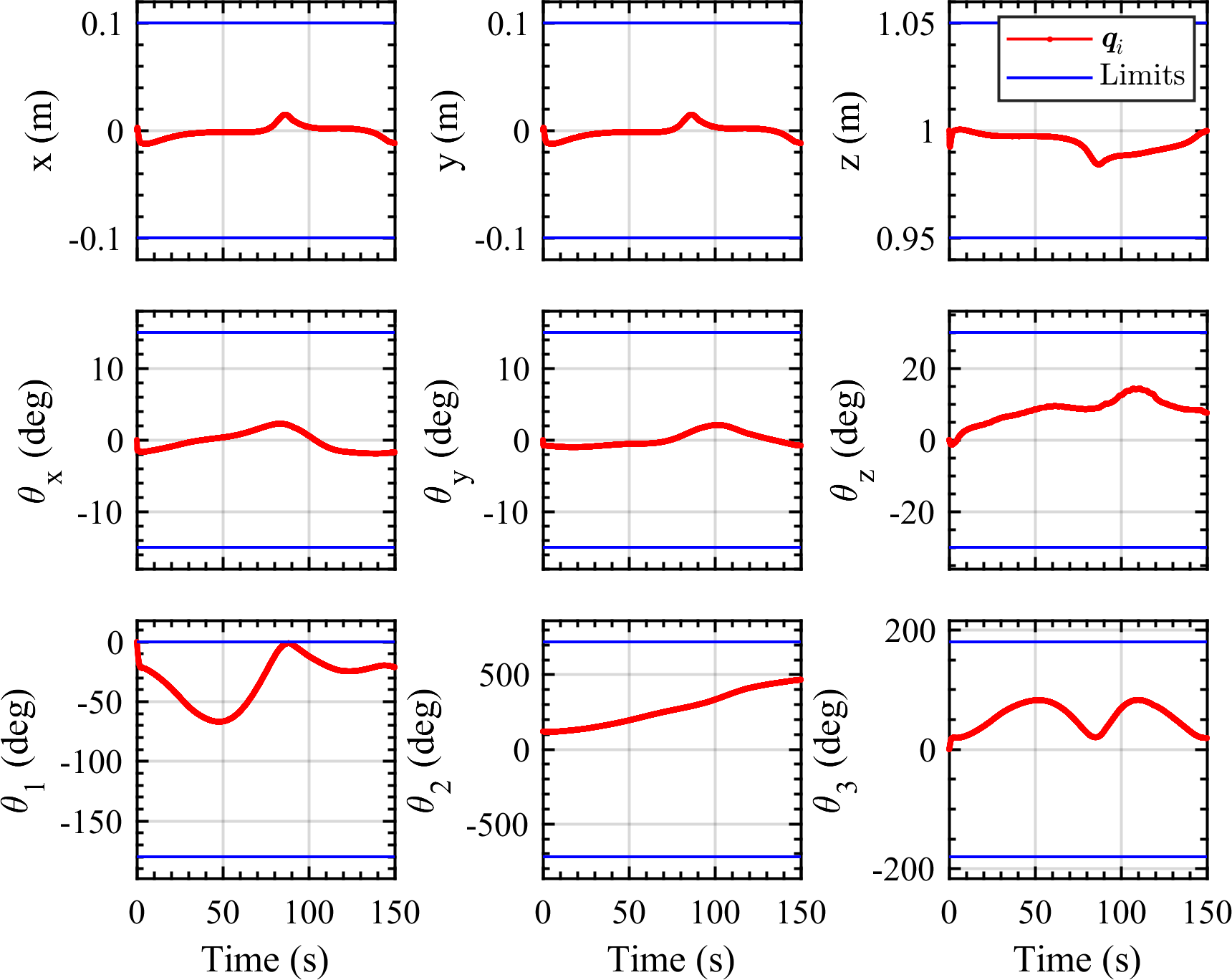
- Hardware Experiment: Tracks a scaled-down orbital trajectory using a closed-loop inverse kinematics controller offering robustness against singularities and joint limit violations.
- Hardware Experiment: This configuration significantly enhances motion capabilities, particularly in translation and rotation, due to the system’s inherent kinematic redundancy. [ASC 2023]
- Hardware Experiment: Such a configuration is particularly valuable for testing control methods for traditional serial-link robotic arms in space missions, where the hexapod replicates 6 DOF satellite motion. [SFMM 2025, IEEE 2025]
Approach 2: S.M.A.R.T.: Satellite Motion Aping Robotic Testbed
Researchers: Daegyun Choi, Sameer Bhalla, Shurendher Kumar Sampathkumar, Anirudh Chhabra
- S.M.A.R.T. - R simulates the attitude of a spacecraft using 4 reaction wheels mounted in a pyramid configuration.
- S.M.A.R.T. - C simulates the attitude of a spacecraft using 4 control moment gyros mounted in a pyramid configuration.
Approach 3: IntroSAT
Researchers: Huu Tri Nguyen, Anirudh Chhabra
- IntroSAT is a table-top CubeSat model actuated by three reaction wheels in orthogonal configuration and represents the 3D rotational motion of a satellite.
Spacecraft Maneuver, Proximity, and Rendezvous
Objectives
Design control methodologies for efficient spacecraft maneuvers and safe proximity operations.
Applications
On-orbit servicing missions, refueling operations, debris removal, spacecraft inspections, etc.
Issues & Challenges
- Cause instability of spacecraft due to dynamically changing system parameters, such as inertia, the center of mass, etc.
- Degrade control accuracy due to external disturbances, such as solar radiation pressure, aerodynamic torque, gravity gradient torque, and geomagnetic torque.
Approaches & Results
Approach 1: Genetic algorithm-aided fuzzy controller for spacecraft attitude maneuver
Researchers: Daegyun Choi, Anirudh Chhabra
- It reorients a spacecraft's attitude using a genetic fuzzy controller subject to uncertain disturbances. [ASCEND 2021]
Approach 2: Fuzzy inference system-applied final approach control of spacecraft rendezvous process
Researchers: Daegyun Choi, Anirudh Chhabra
- It provides a control force for the chaser spacecraft to approach the target in orbit under disturbances. [ICCAS 2023, SFMM 2023]
Approach 3: Constrained nonlinear optimization for spacecraft inspection
Researchers: Daegyun Choi, Donghoon Kim
- It provides an optimal thrust force trajectory that maximizes the inspection rate and minimizes the ∆\(v\).
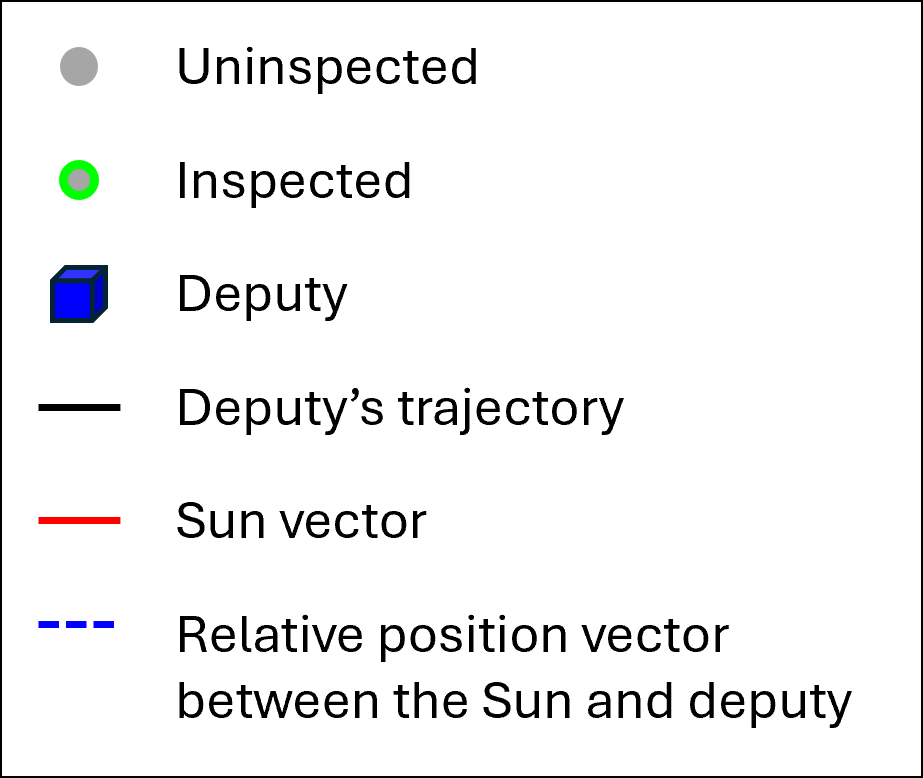
Approach 4: Genetic fuzzy-driven autonomous spacecraft inspection [DCASS 2025]
Researchers: Daegyun Choi, Donghoon Kim
- It provides a deputy's sub-optimal thrust force that consumes minimal ∆\(v\) while maintaining reliable inspection within various constraints, such as illumination, restricted field of view, thrust limits, and safe regions.
Approach 5: Bio-inspired motion adaptation for space manipulator systems [DCASS 2025]
Researchers: Alhim Vera, Daegyun Choi
- It provides space manipulator systems' operational strategies based on the lizard's mid-air self-righting motions.
Multi-agent Coordination and Decentralized Control
Objectives
Develop a decentralized optimal control strategy to operate multi-robot systems (MRSs) collaboratively.
Applications
Object transportation, area coverage, foraging distributed objects, planetary exploration, etc.
Issues & Challenges
- Avoid complex mechanisms subject to a multi-capability multi-robot design.
- Reduce cost per task by performing collaborative tasks.
- Guarantee reduced risk of mission failure.
- Ensure proper modeling of uncertainties.
Approaches & Results
Approach 1: Genetic fuzzy controller
Researcher: Daegyun Choi
- It provides a decentralized control for MRSs for transporting an object to a target location with minimum travel while keeping stability. [Electronics 2021], [SFMM 2021]
Approach 2: Reinforcement learning (RL)
Researcher: Kaushik Palani
- Two robots learn how to move an object to a target location collaboratively subject to minimum travel and stability using RL. [DCASS 2022]

Space Actuator-driven Robotics
Objectives
Develop ground robotic platforms that can overcome environmental barrier constraints.
Applications
Lunar surface exploration, off-load delivery, etc.
Issues & Challenges
- Require complex design and control.
- Provide only limited motions.
Approaches & Results
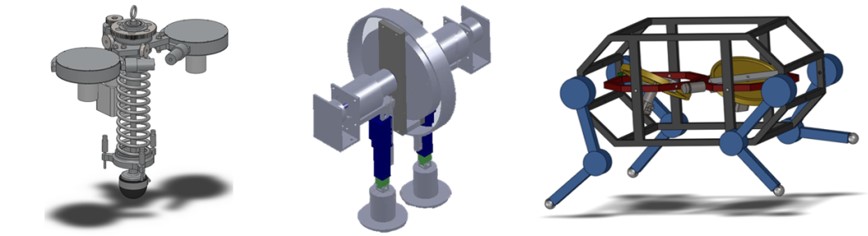
Approach 1: Control moment gyroscopes (left & right) and reaction wheels (middle)-driven robot design and operation
Researcher: Donghoon Kim
- It achieves a target position via like jumping (left) and skating (middle) and a stable pose (right) using the space system control principle.

Situation-aware navigation
Objectives
Develop human-environmental factors adaptive navigation system for autonomous mobile robots.
Applications
Navigation-based service provision for humans in restaurants, supermarkets, airports, etc.
Issues & Challenges
- Predict situational changes rapidly.
- Trade-off robot performance and human preference.
- Decide follow-on action rapidly.
Approaches & Results
Approach 1: Djikstra + enhanced potential field + genetic algorithm
Researcher: Jashwanth Rao Venepally
- Mobile robots navigate in a dynamically changing shopping environment to pick up given shopping items subject to minimum travel and human safety.
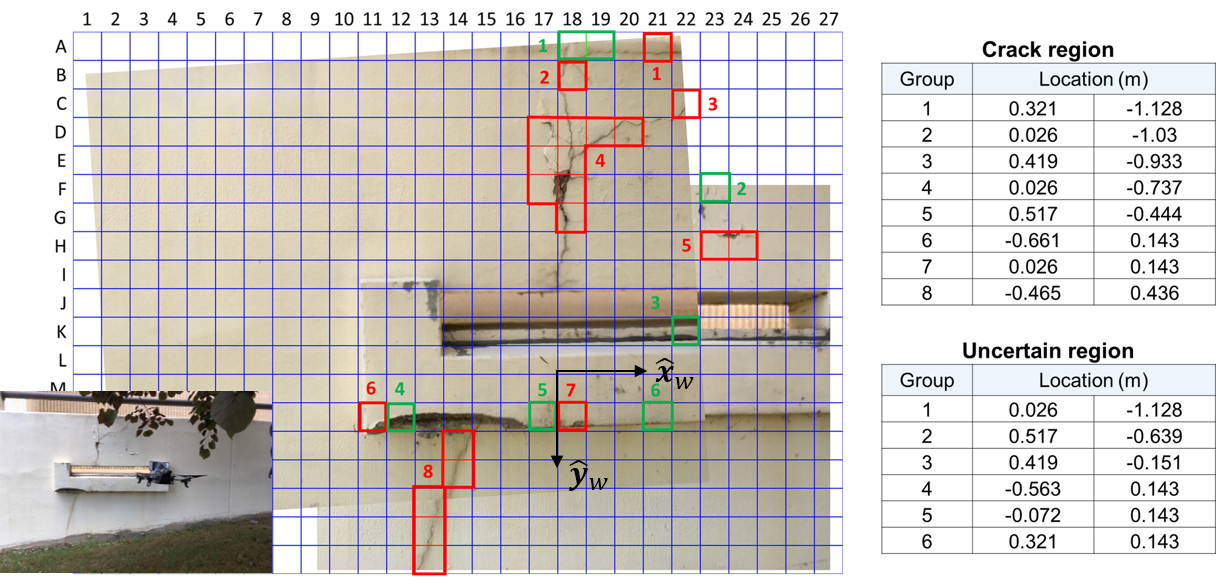
Computer Vision-based Anomaly Detection
Objectives
Develop a framework to identify anomalies including locations in structures.
Applications
Structural health monitoring, building inspections, etc.
Issues & Challenges
- Localize and group detected cracks automatically for human effort minimization.
- Provide means to minimize the risk of false detection.
- Ensure satisfactory decision-making in terms of accuracy.
- Provide a solution for human risk minimization.
Approaches & Results
Approach 1: Convolutional neural networks (CNNs) + image processing
Researcher: Daegyun Choi
- It identifies structural cracks, groups the adjacent cracks, and determines their location via CNNs and image processing. [Sensors 2021]
Dynamic Wireless Sensor Networks for Geolocation
Objectives
Design seamless dynamic wireless sensor networks (DWSNs) for geolocation.
Applications
Navigation in GPS-denied environment, etc.
Issues & Challenges
- Enlarge localizable space in sparse sensor networked environments.
- Provide a cost-efficient solution for maximizing sensor networking.
- Distribute sensors optimally for robustness improvement against unexpected noise/disturbance caused by obstacles.
Approaches & Results
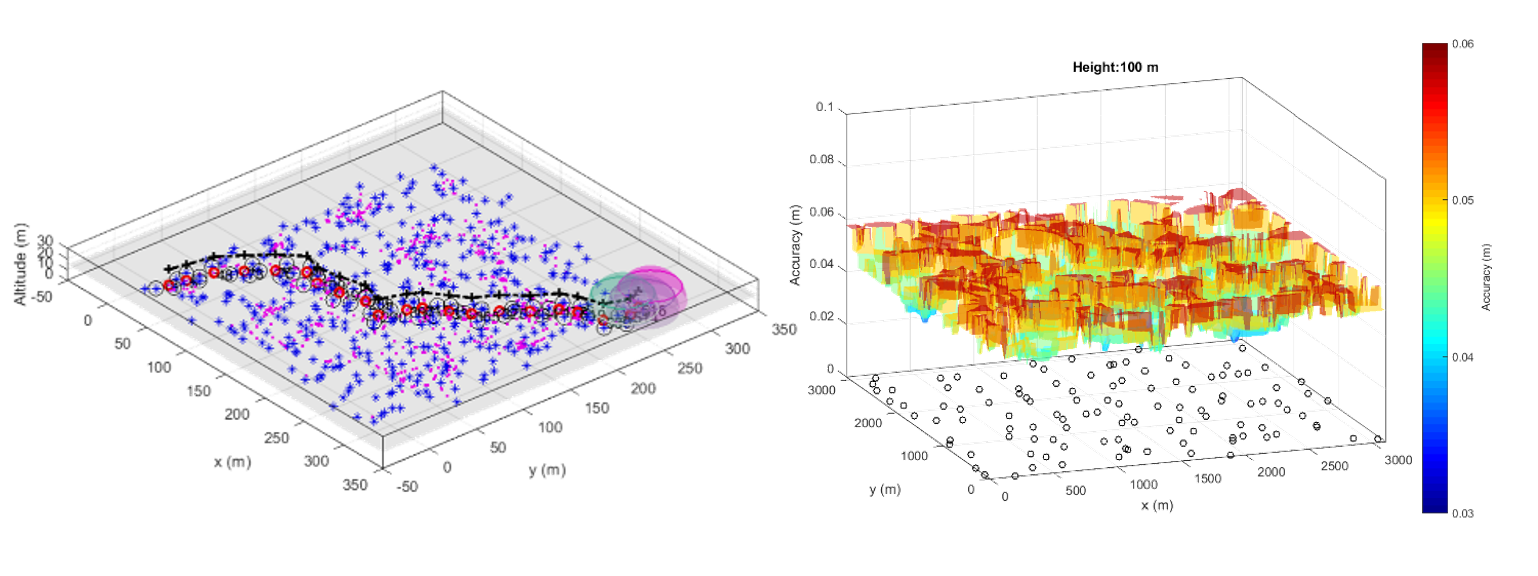
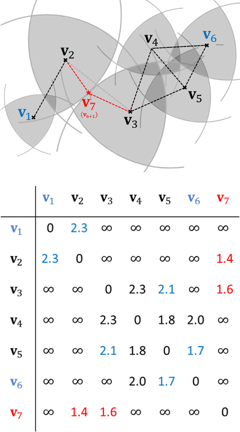
Approach 1: Localizable 3D map generation with its accuracy
Researcher: Donghoon Kim
- It generates the localizable 3D map given randomly distributed disposable sensors and analyzes the map accuracy. [D. Kim, Technical Report 2, 2020]
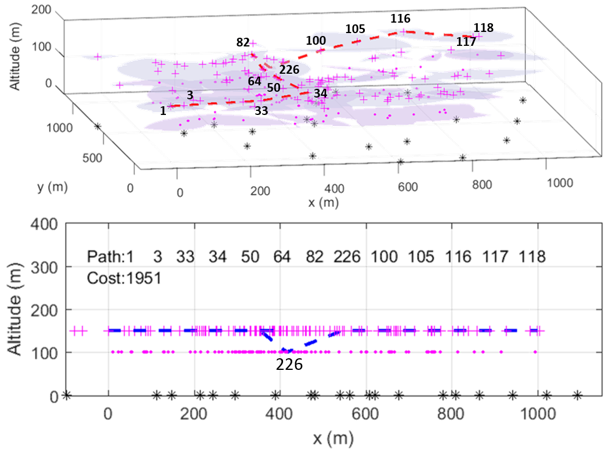
Approach 2: Efficient navigation for unmanned agents in sparse wireless sensor networked environments
Researcher: Donghoon Kim
- It navigates by identifying the optimal path given the localizable space information. [TJSASS 2021]
Interference-robust positioning systems
Objectives
Develop an interference-robust, low-cost, and accurate positioning system (PS).
Applications
Security in networks, information management, optimization of the services of emergency, etc.
Issues & Challenges
- Guarantee robust performance in the presence of unexpected noise characteristics caused by environment.
- Ensure low computational burden.
- Adapt to environmental changes real-time.
Approaches & Results
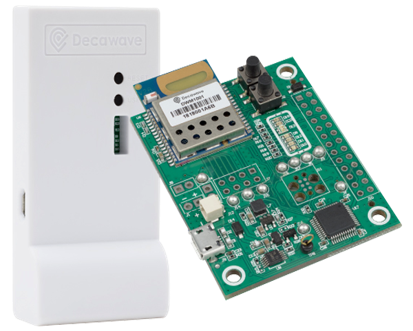
Approach 1: Ultra-wideband sensors
Researchers: Anirudh Chhabra and Jashwanth Rao Venepally
- It develops ultra-wideband sensor technology-based PS.

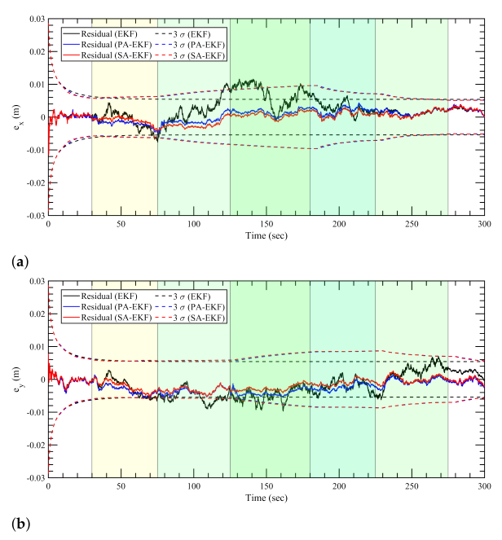
Approach 2: Piecewise adaptive and sequentially adaptive extended Kalman filters
Researchers: Anirudh Chhabra and Jashwanth Rao Venepally
- It estimates states robustly using measurement noise covariance-adapting Kalman filters in varying sensor noise situations. [DCASS 2021], [Sensors 2021]